SCF'25 Article: Accessible Non-Planar FFF
🚀 Our Work Will Be Presented This Friday at SCF’25 at MIT!
Towards Accessible Non-Planar FFF Using Triple Z-Axis Kinematics
I’m excited to share that our latest research will be presented this Friday at the ACM Symposium on Computational Fabrication (SCF ‘25), hosted at MIT - by Giovanni Cocco and Vincent Belle.
In this work, we explore how to make non-planar fused filament fabrication (FFF) truly accessible by upgrading standard 3D printers with minimal, low-cost modifications.
🔧 What we propose:
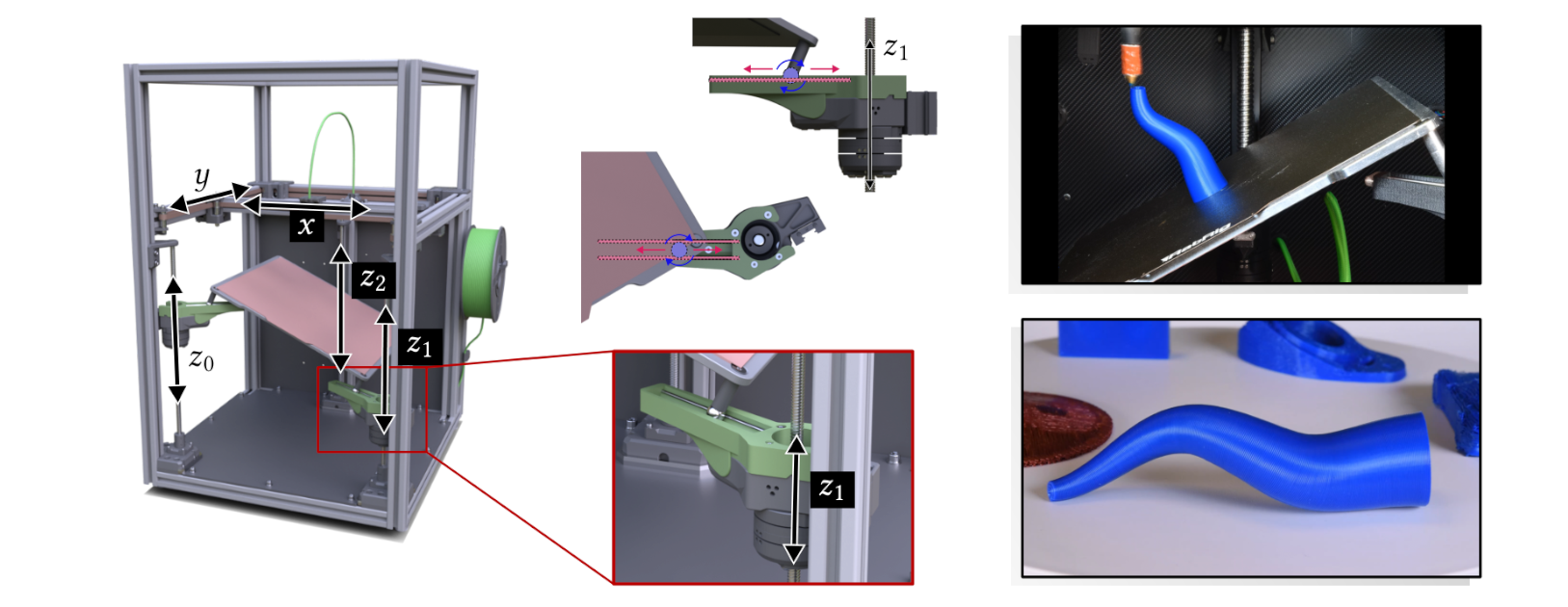
By extending the rails and bed screws of triple Z-axis printers-such as the RatRig V-Core-we enable up to 30° of bed tilt, unlocking true non-planar 5-DOF printing without the need for robotic arms. We also introduce a complete closed-form kinematic model and an open-source Python implementation for mapping curved toolpaths to machine space.
✨ Key highlights:
- Closed-form forward & inverse kinematics for 3-Z machines
- Open-source implementation for toolpath conversion
- Minimal hardware modification enabling curved-layer printing
- Build volume, tolerance, and interpolation analysis
- Successful fabrication of complex non-planar models
This work lowers the barrier to experimenting with advanced additive manufacturing techniques.
📄 Authors: Giovanni Cocco, Eric Garner, Vincent Belle, Cédric Zanni, and Xavier Chermain 📍 Université de Lorraine, CNRS, Inria, LORIA (Nancy, France)
👉 Read the paper: https://xavierchermain.github.io/publications/threez
We thank Pierre-Alexandre Hugron, who was crazy enough to believe that the RatRig could serve as a 5-axis 3D printer.
This work was supported by:
- the French National Research Agency (ANR) under Grant ANR-24-CE10-6403
- the Grand Est Region (France) under Grant 25E00156671
- and partially by the Inria Challenge DORNELL